|
|
|
NAVCON This is our first project that MSRTK are undertaking. We are currently looking for new team members. If you are interested in further developing NAVCON by becoming a part of our team please visit Join Us. If you are looking for further information, please visit Resources for previous publications on the development of NAVCON and links to other useful resources. |
|
What is Navcon? Small, inexpensive and power efficient multisensory platform, designed to stabilise, and provide navigation and communication for Unmanned Aerial Vehicles (UAV). The system is highly accurate and reliable with an integrated GPS receiver with Real Time Kinematics (RTK), Accelerometer, Magnetometer, Gyroscope and Pressure Sensor. Why Navcon?
What Applications?
|
|
|
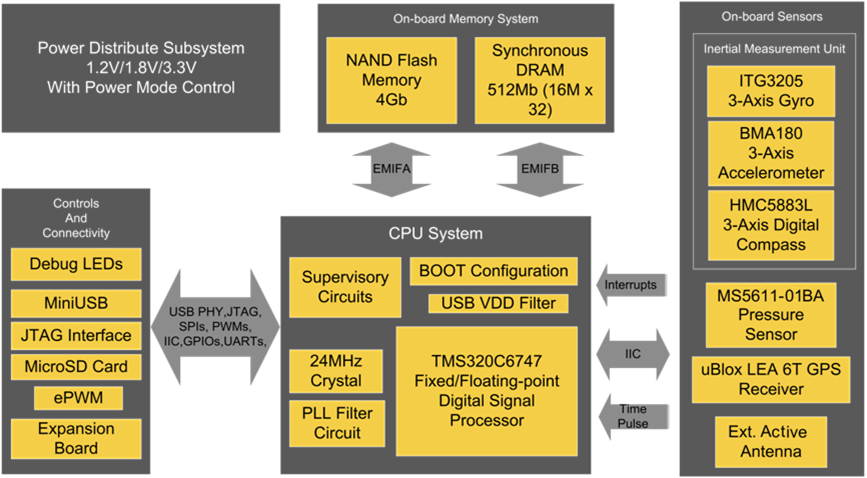
What is Inside NAVCON? Hardware Block Diagram of Navcon
Summary of NAVCON's Technical Specification |
Where is NAVCON at? NAVCON is still undergoing development. The next stages are to finish the control portion to NAVCON and upgrade the hardware to further reduce NAVCON’s size. What is in NAVCON's Future Our vision is to make NAVCON into a small packageable device that can be used to navigate and control UAVs and be easily adapted for other applications. |
|
Home |
NAVCON |
Resources |
About us |
Join us |
Copyright © 2015 Navextech. All Rights Reserved. Contact us |